RLWRLD releases RLDX-1, a dexterity-first foundation model for robot hands
Robotics Business Review
AI SUMMARY
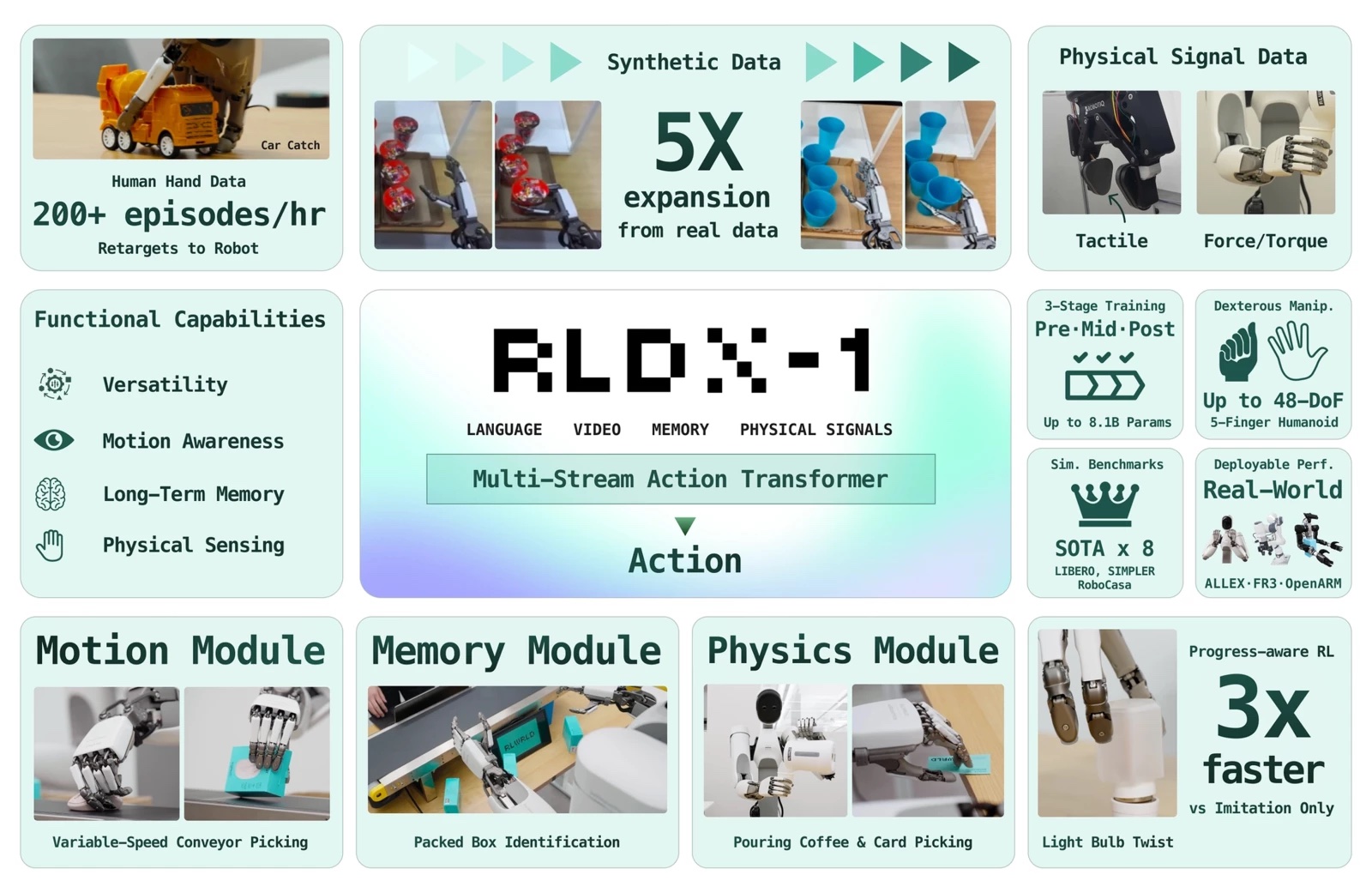
RLWRLD introduced RLDX-1, a foundation model designed specifically for robotic hands that prioritizes dexterity and fine motor control. The model incorporates capabilities like context memorization and force sensing that are typically absent from existing robotics models.
FROM THE ARTICLE
RLWRLD said with RLDX-1, it aimed to include things like context memorization or force sensing, which existing models often lack. The post RLWRLD releases RLDX-1, a dexterity-first foundation model for robot hands appeared first on The Robot Report .
This story was originally published by Robotics Business Review.
Read Full Story on Robotics Business ReviewRelated Stories
Drones & RoboticsABB Robotics includes vSLAM navigation in F712 autonomous forkliftRobotics Business ReviewDrones & RoboticsTesollo initiates IPO process while developing humanoid handsRobotics Business ReviewAI & Machine LearningHIVE brings in $15M to build physical AI for industrial machinesRobotics Business ReviewDrones & RoboticsKraken Robotics acquires Covelya Group for $615MRobotics Business Review